Gripper Thumb Servo Attachment






































Description
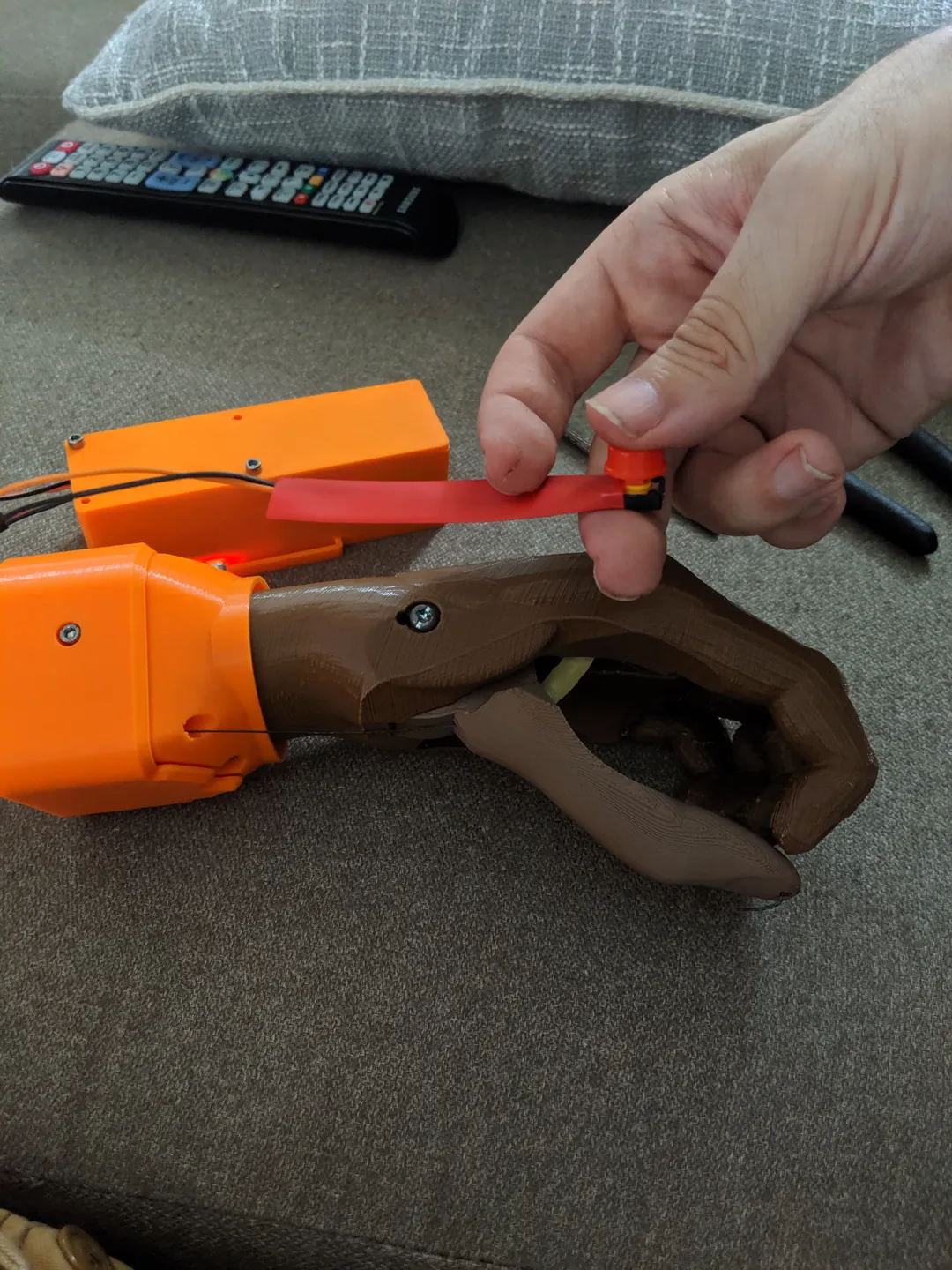
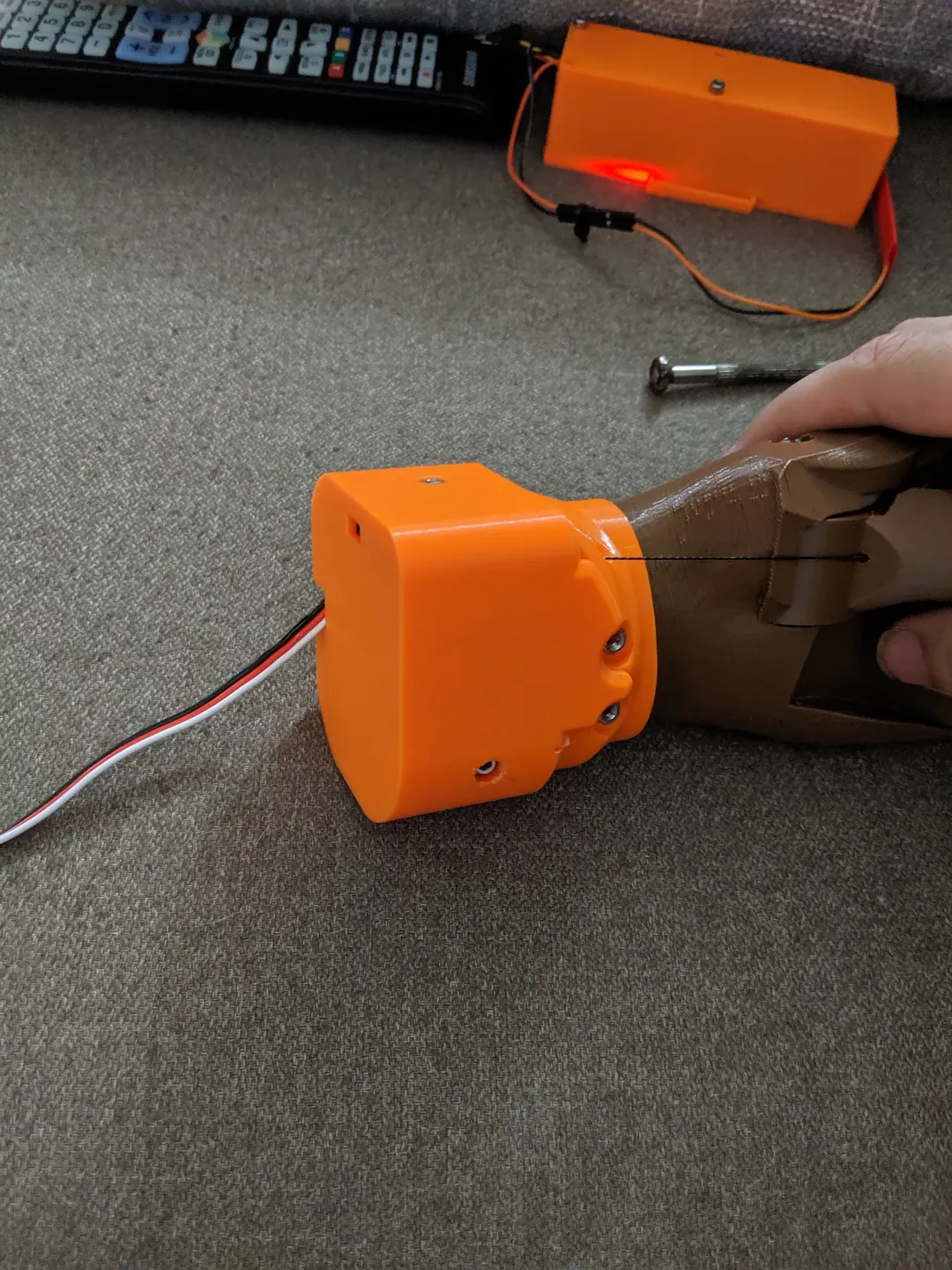
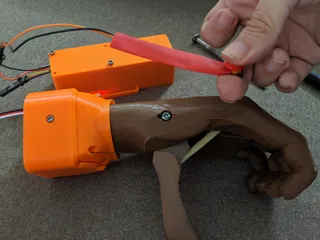
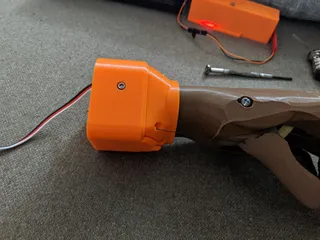
PDFThis is a set of pieces meant to attach a servo to the back end of a gripper thumb terminal device to allow mechanical actuation using a switch. The total weight of the entire devie is roughly 500 grams which compares favorably with commercial options. It is a work in progress but has reached a point for beta testing. The design has been made possible by funding from the eNABLE Fund.
Video demonstration can be found here:
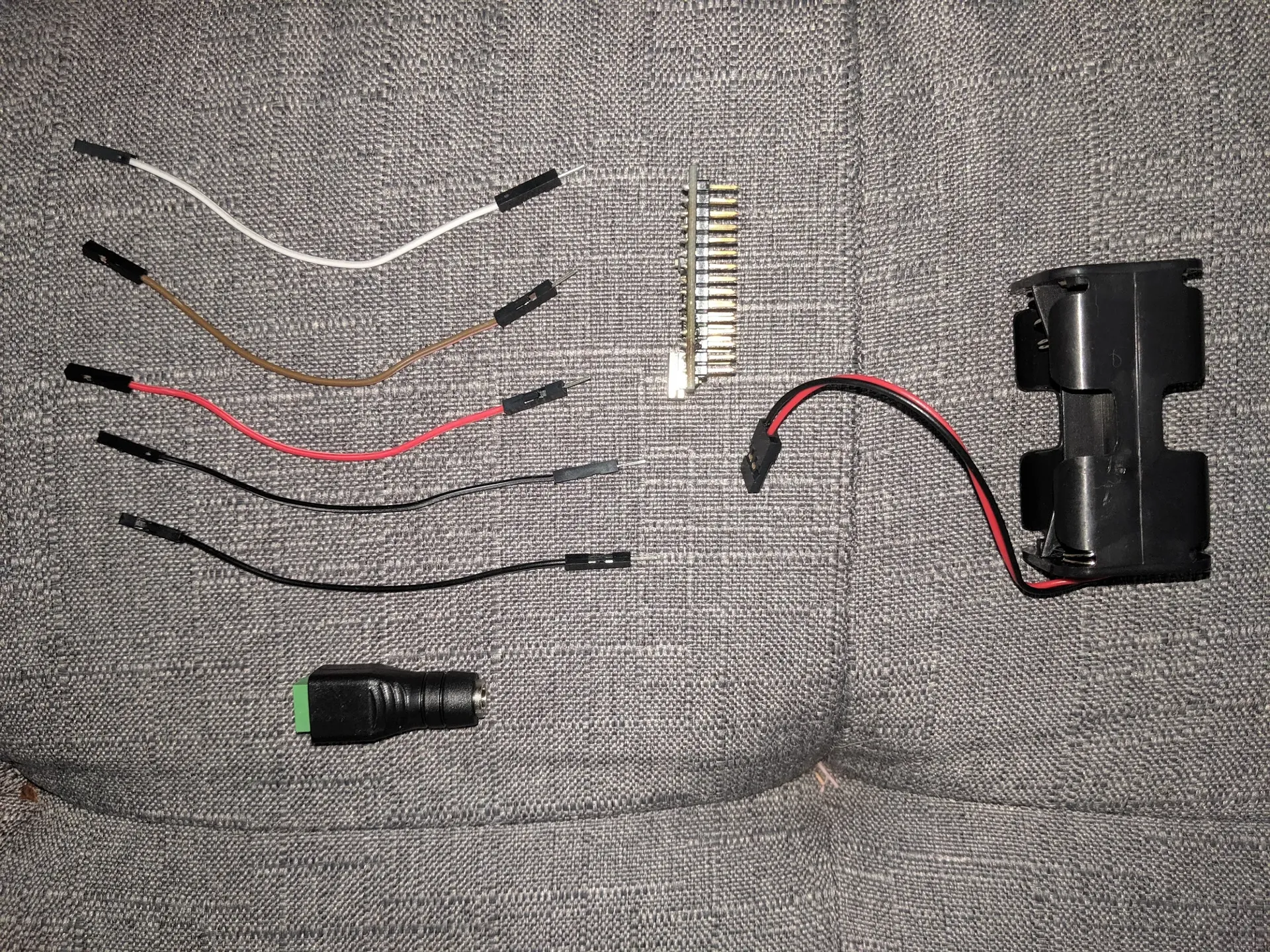
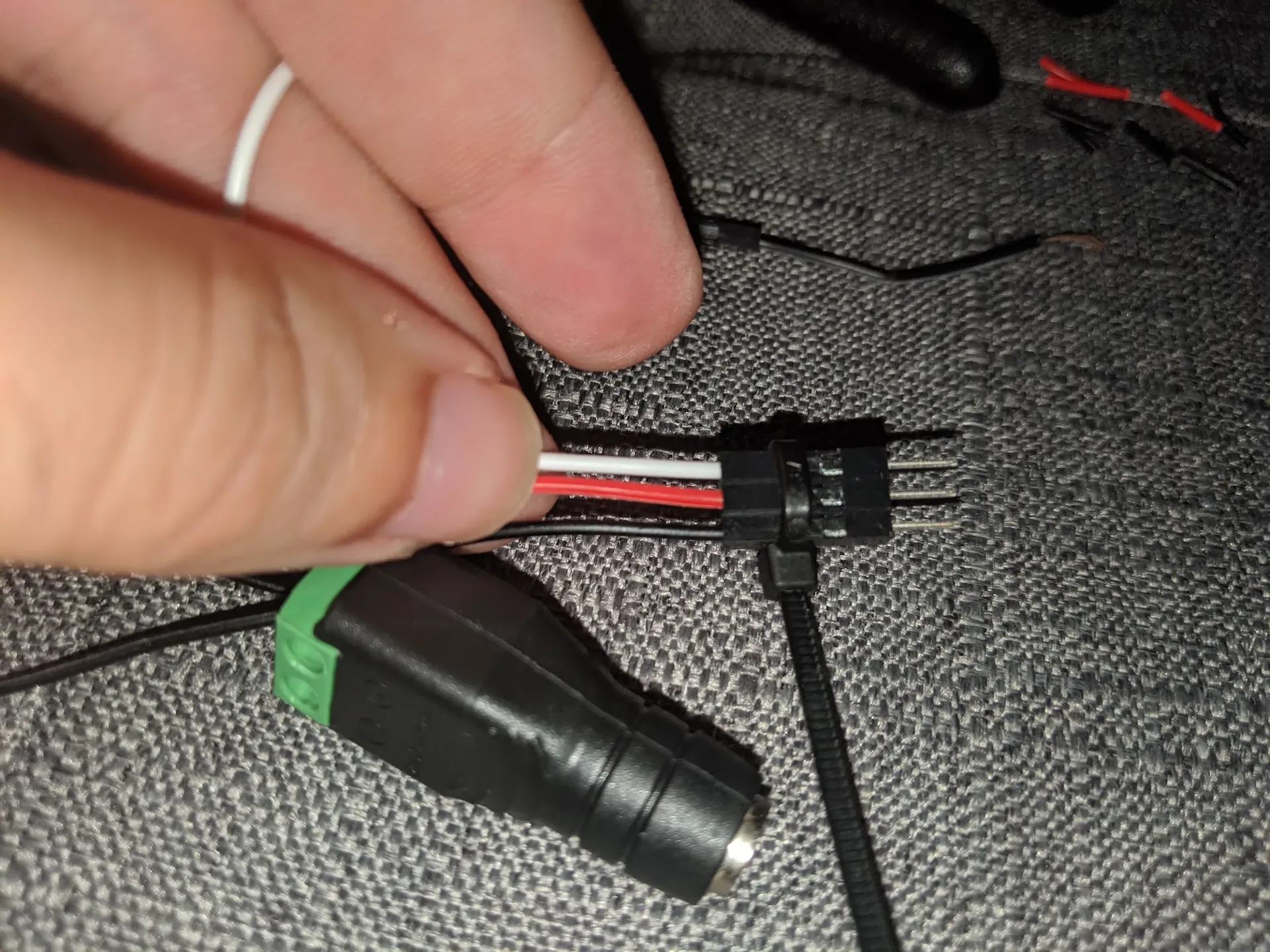
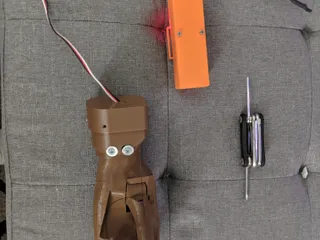
The files include:
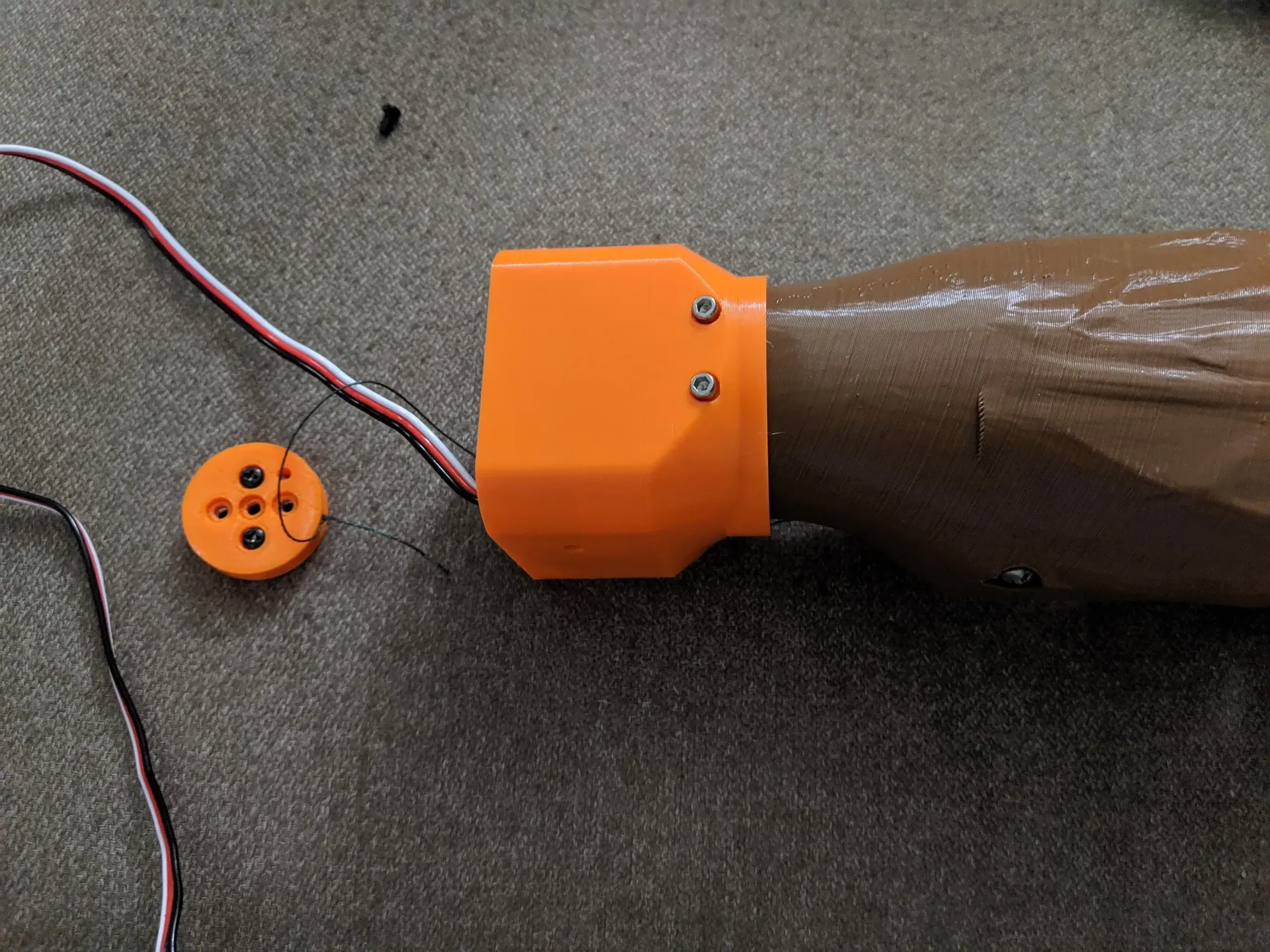
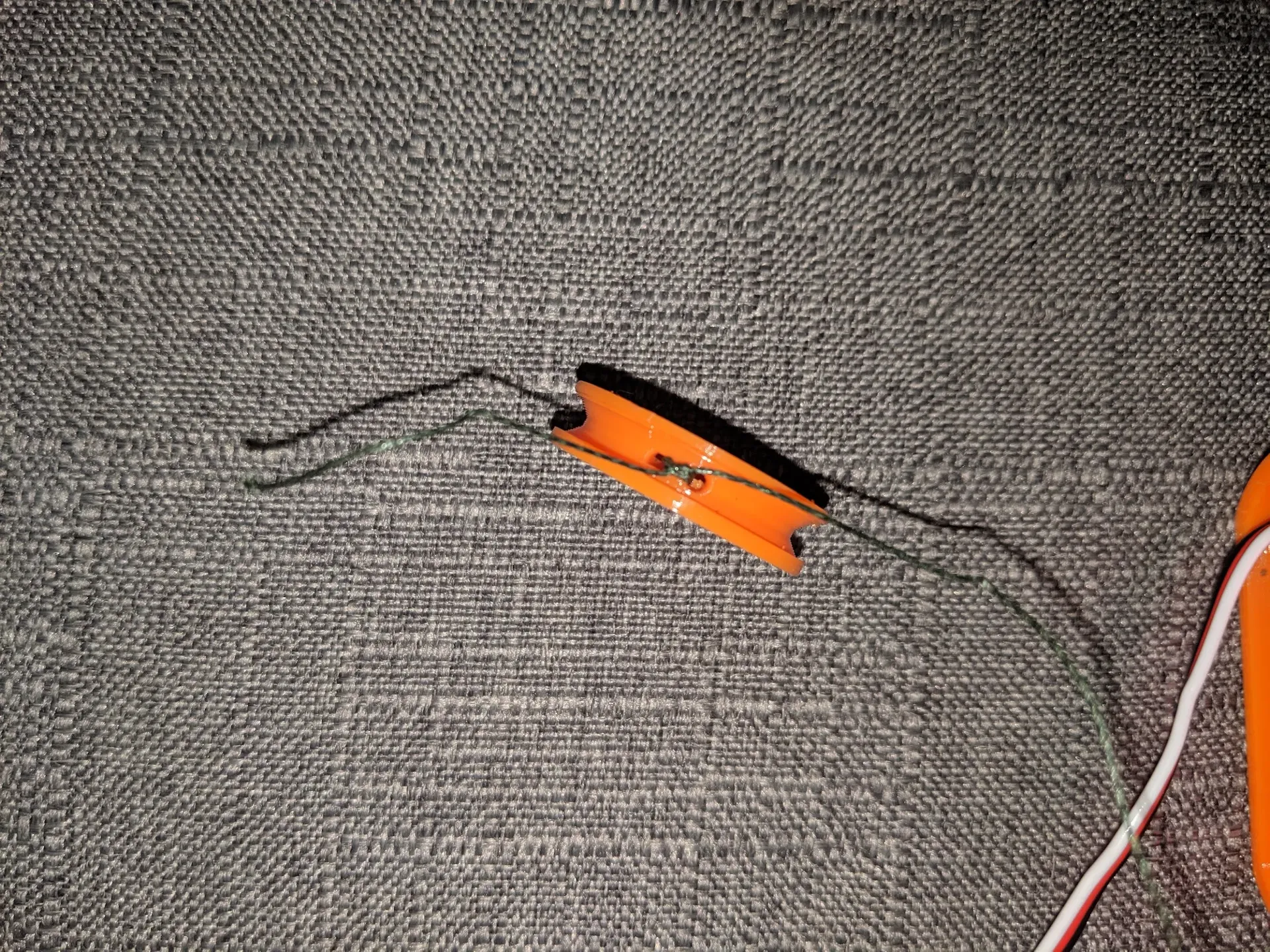
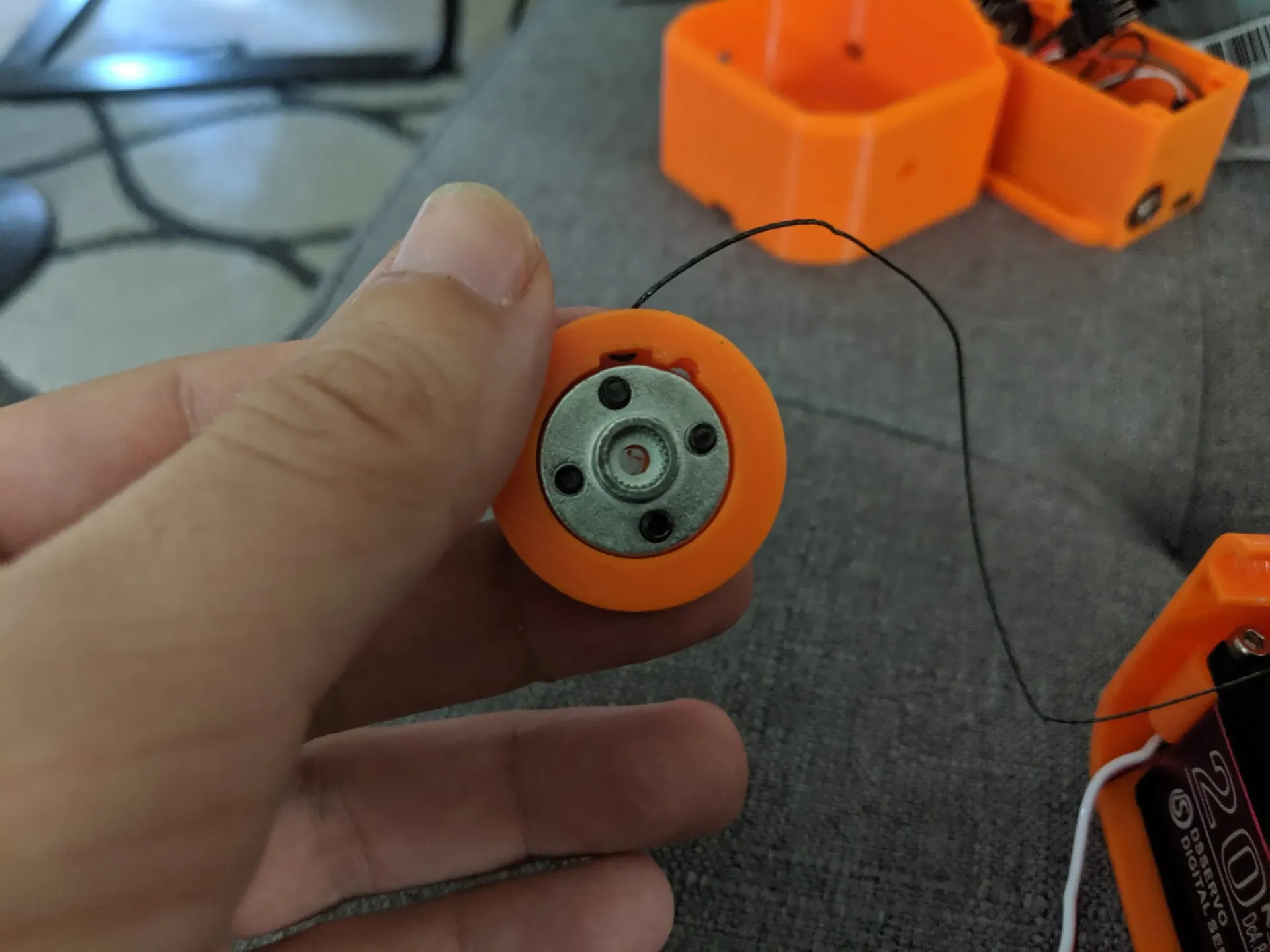
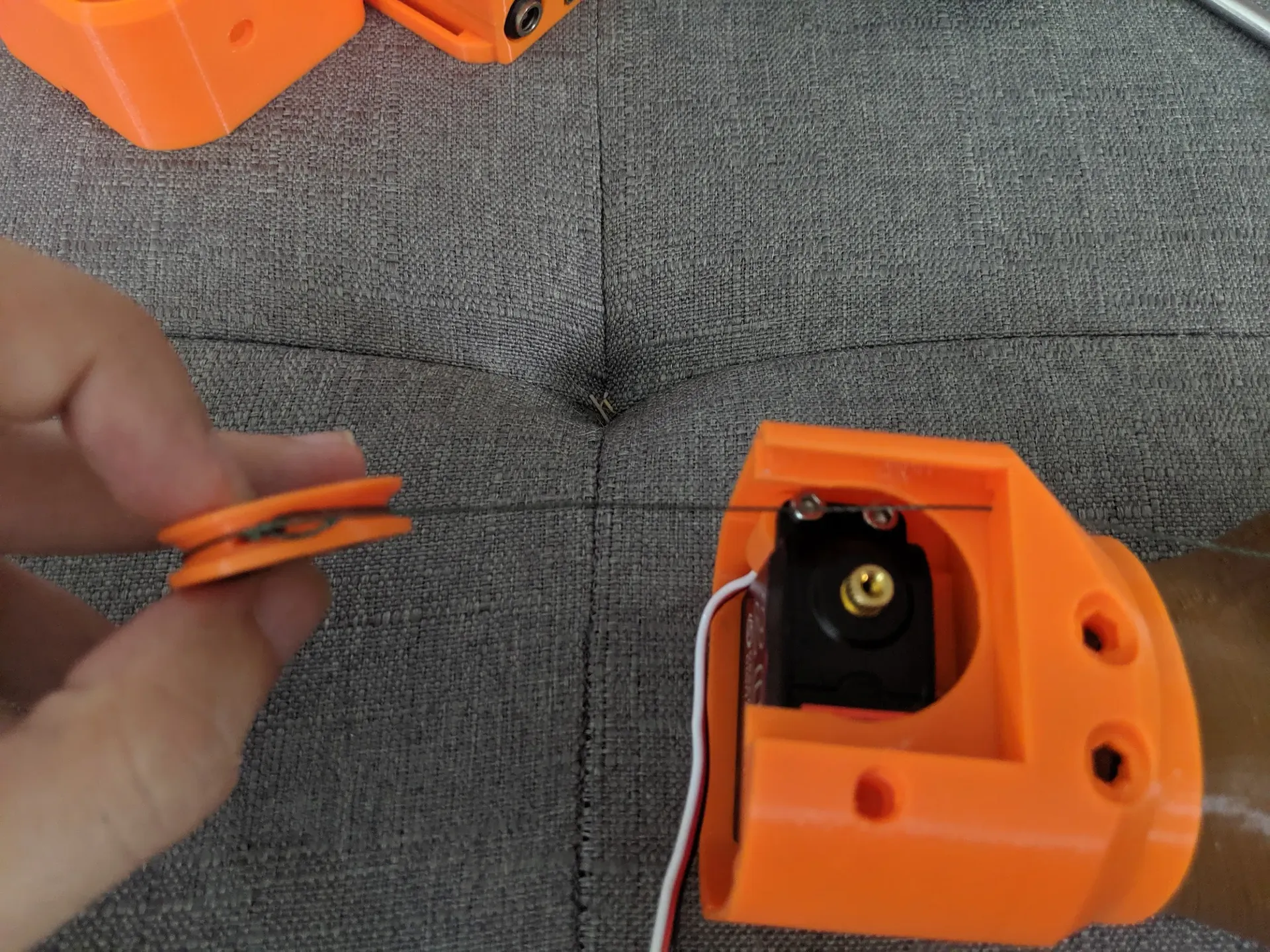
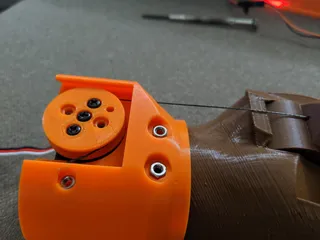
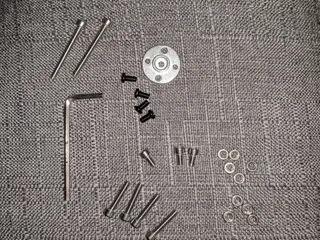
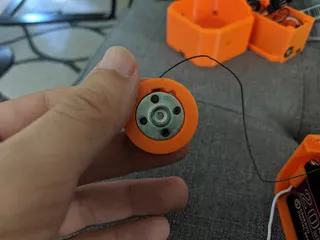
Servo horn - attaches to a servo to allow for the proper amount of travel to pull the thumb to an open position.
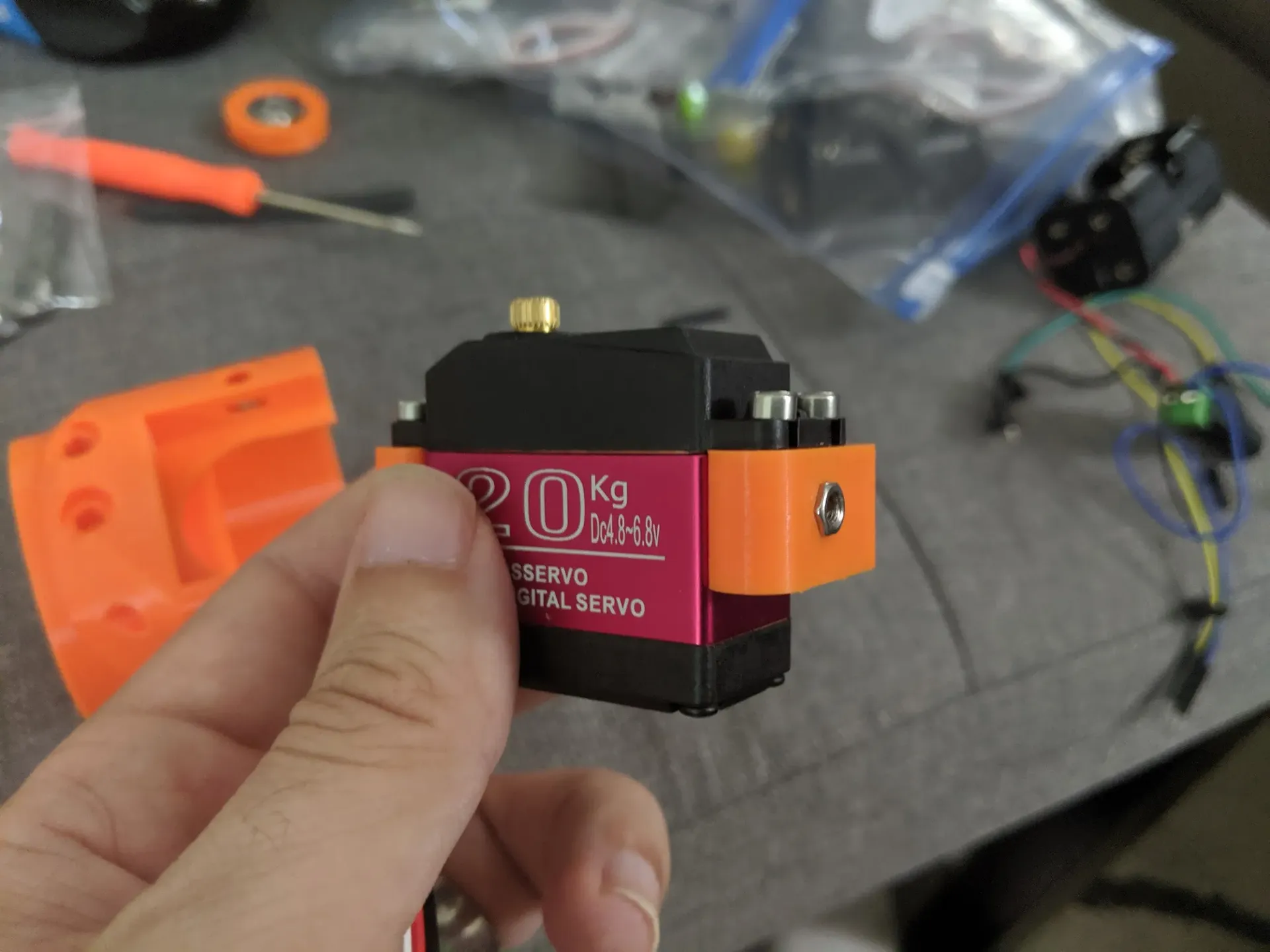
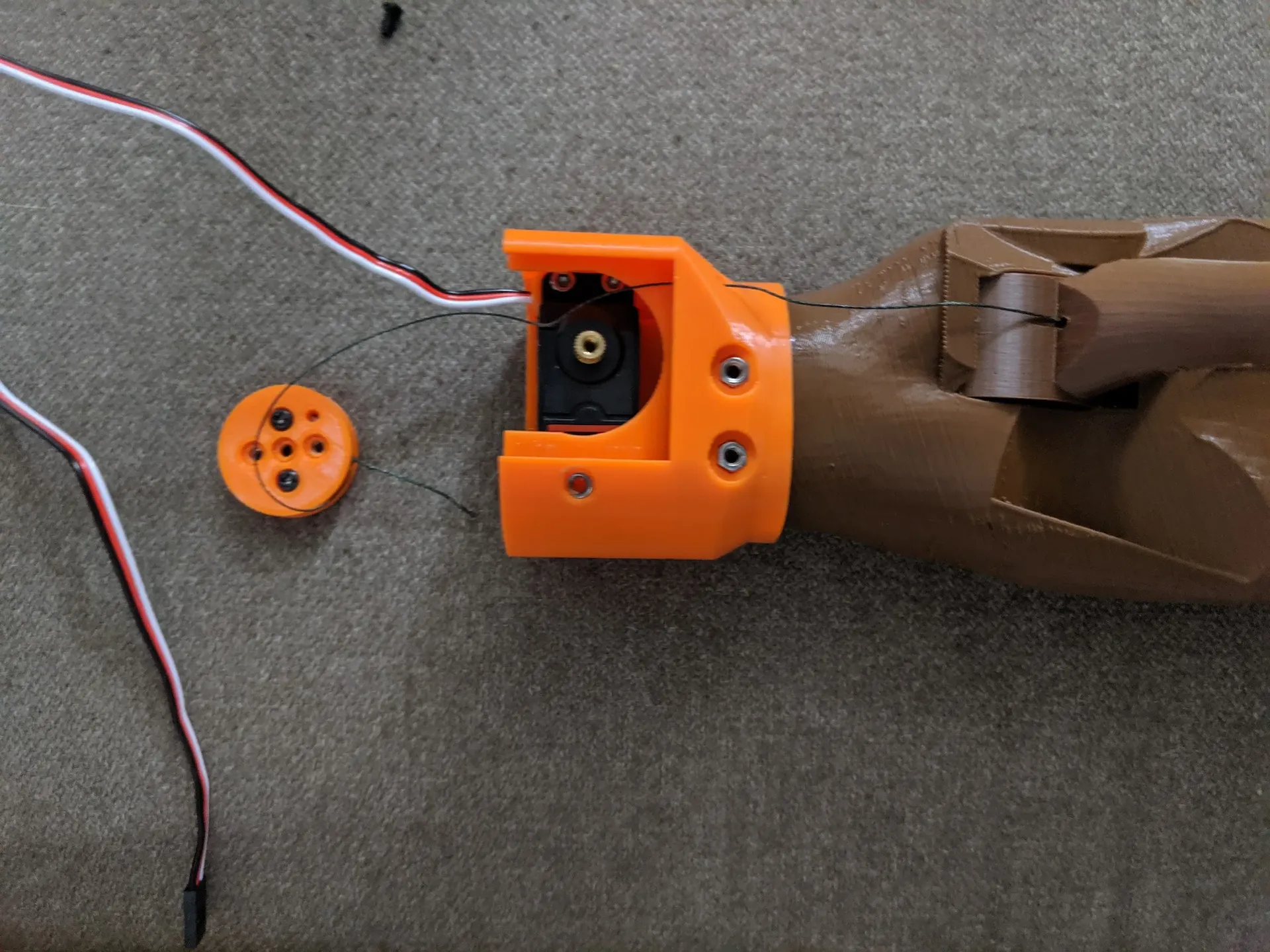
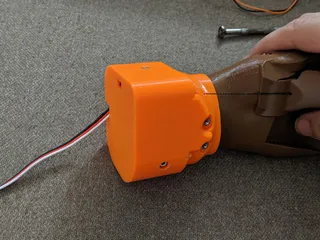
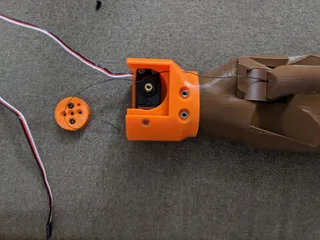
Servo Mount - attaches to the servo and contains screw holes for firmly securing outer covering
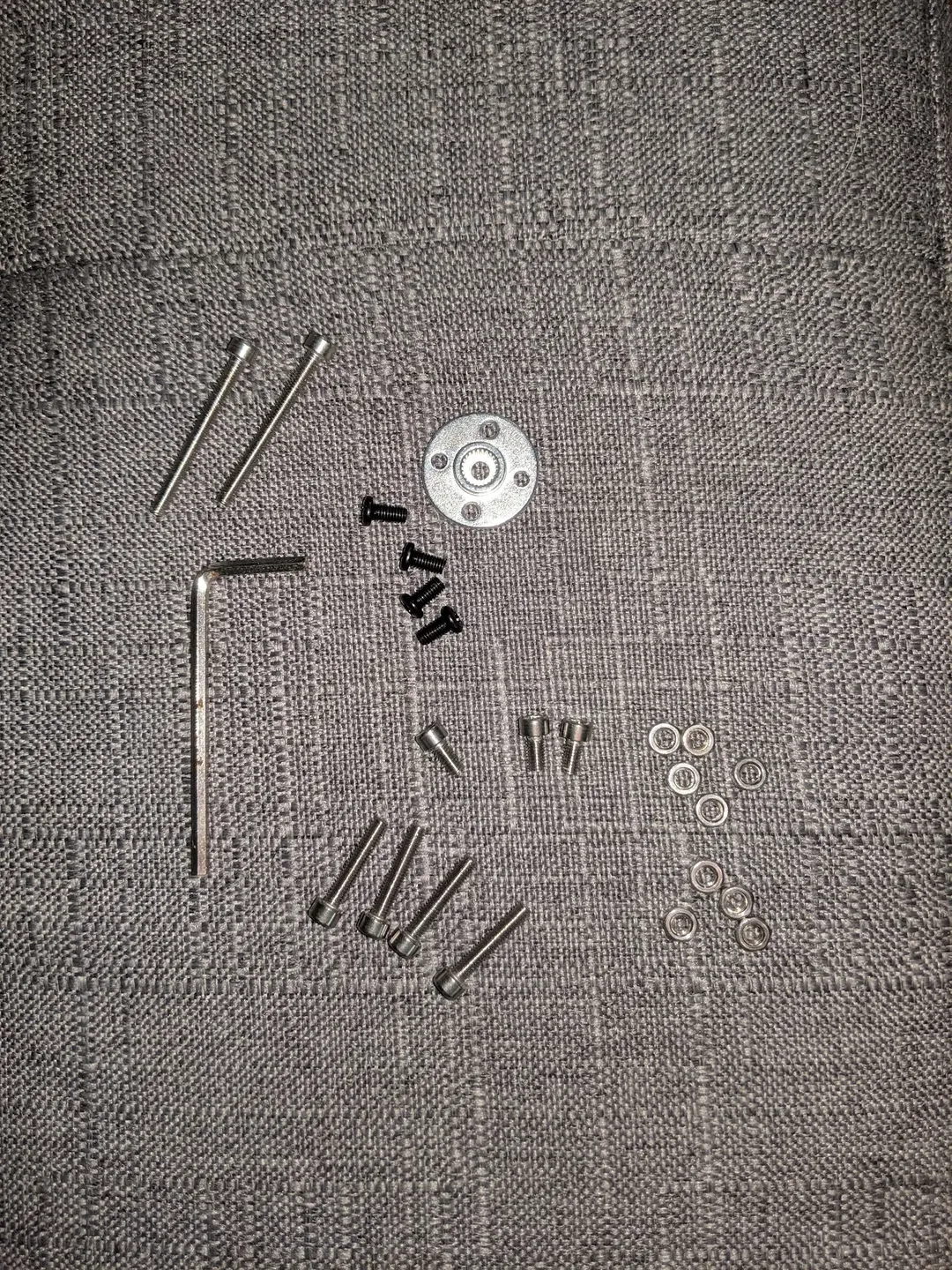
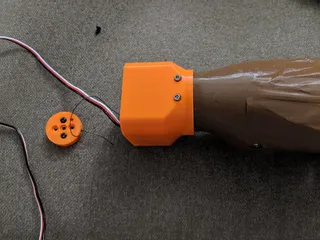
Wrist Servo Attach - the servo mount slides into this piece which is screwed onto the end of a gripper thumb terminal device using 2 m3 x 60 screws and nuts
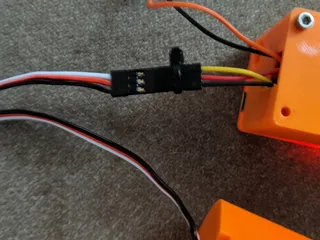
Wrist Sheath - attaches to the backend of the Wrist Servo Attach piece to seal everything. Is secured to the device using 3 m3x6 screws. Holes are provided to run servo motor wiring to the control box
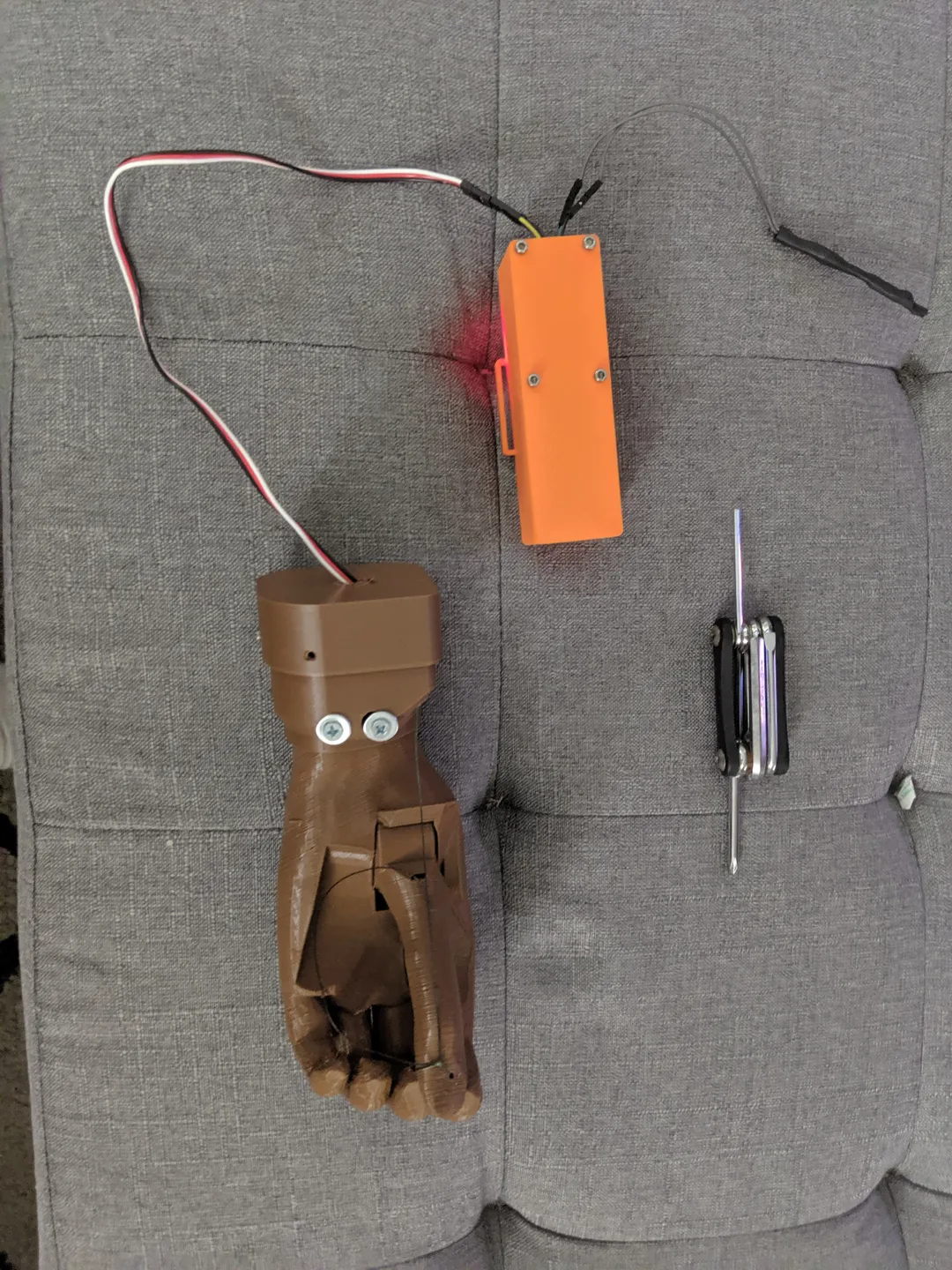
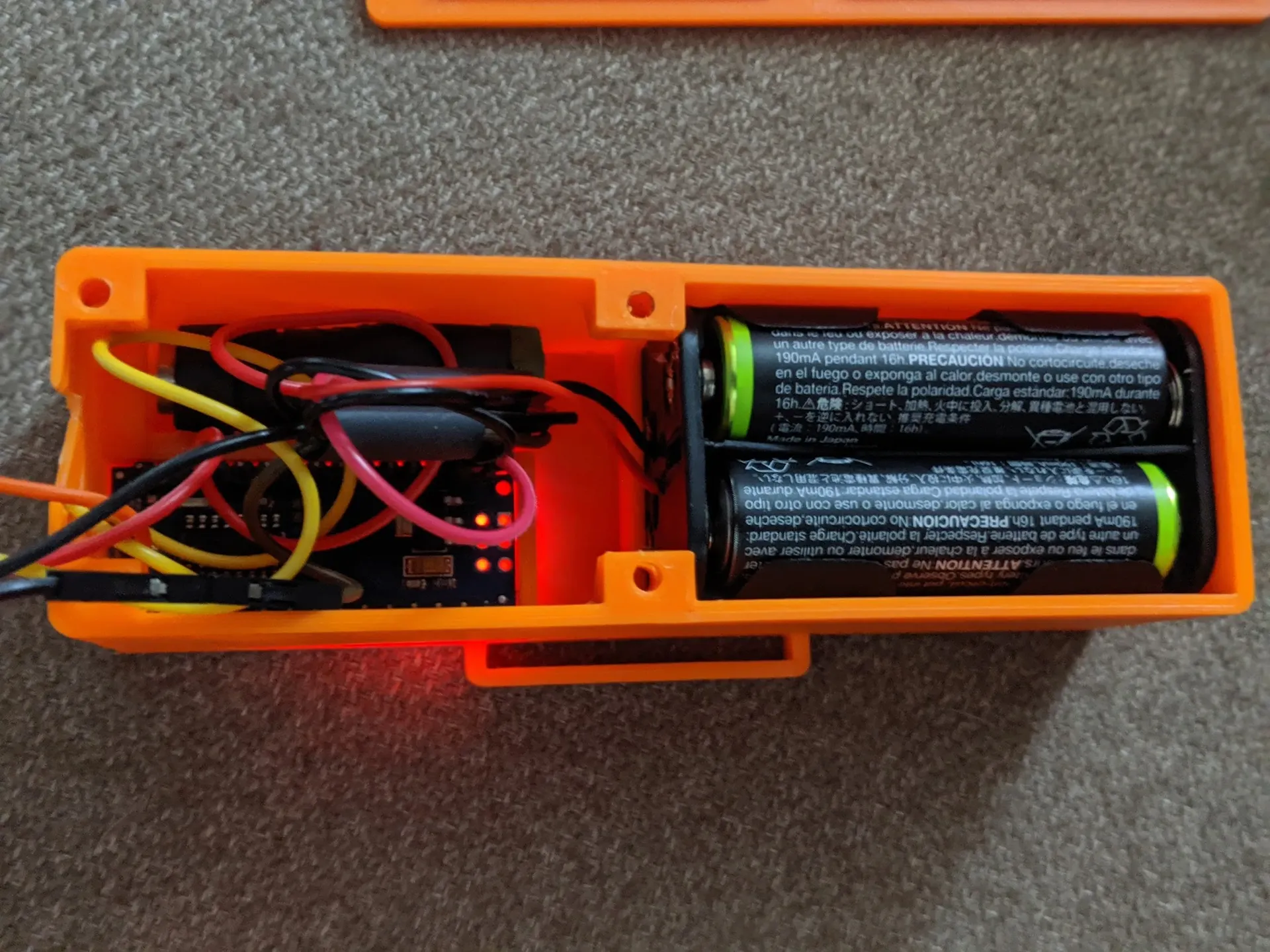
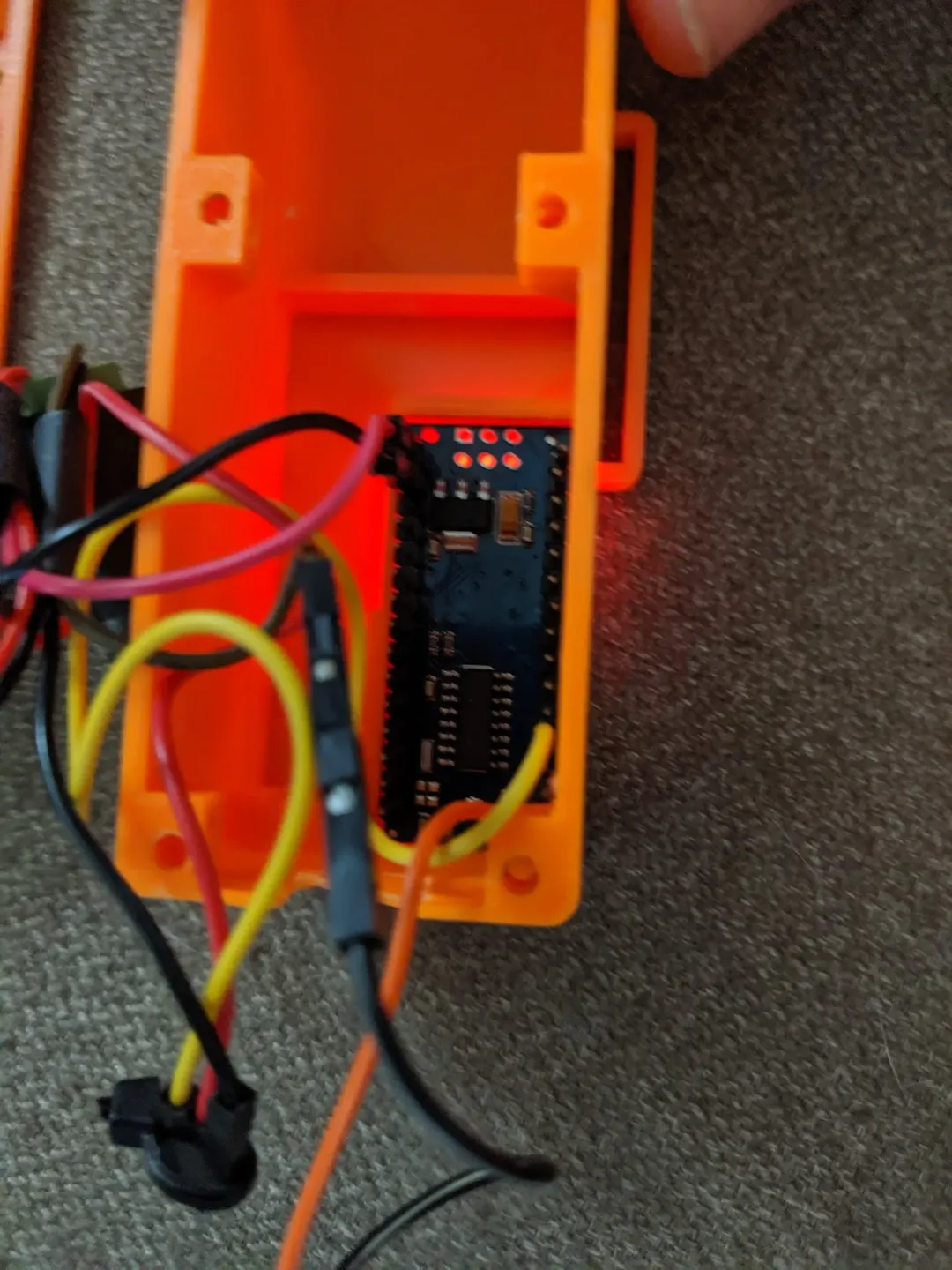
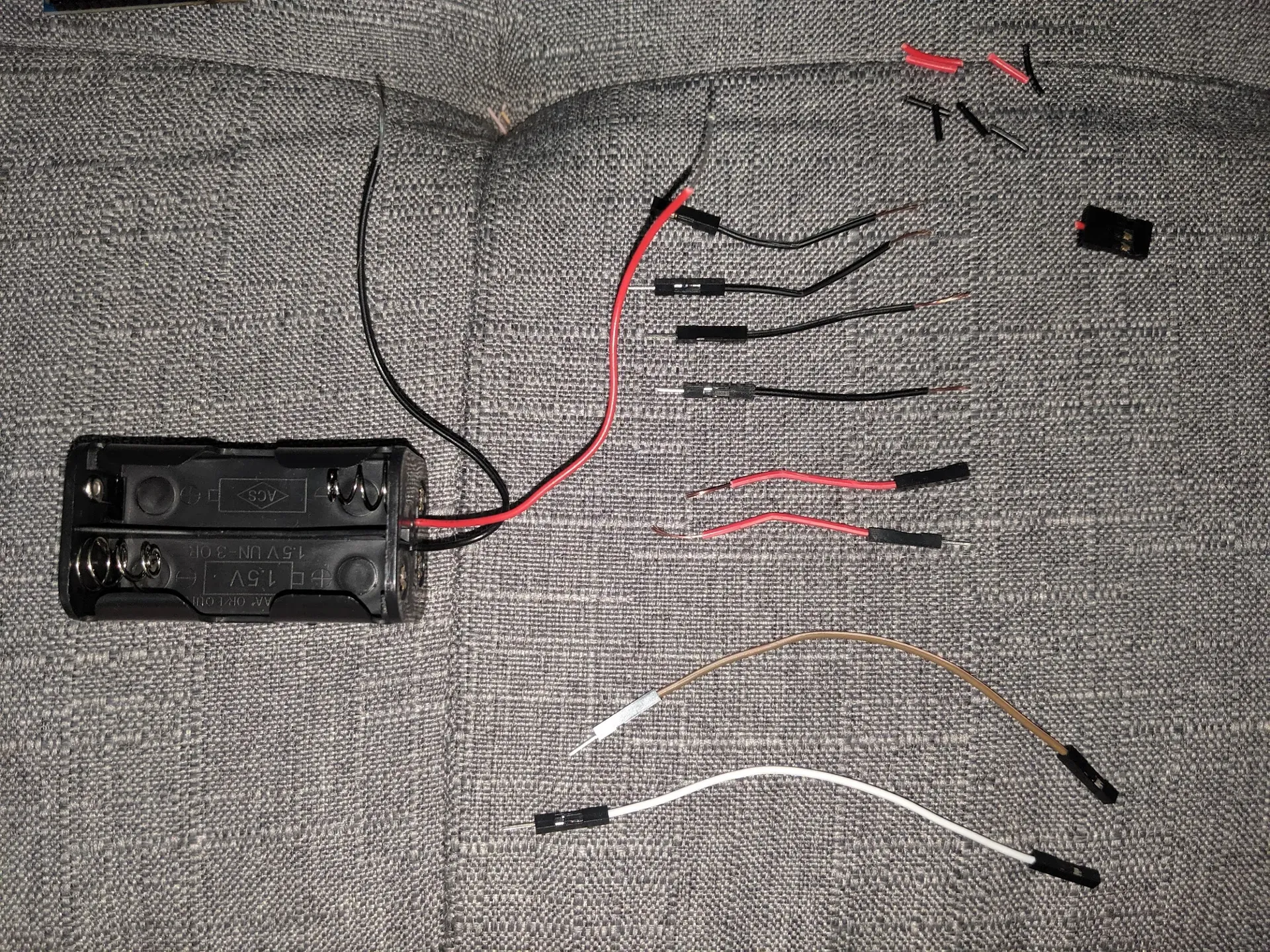
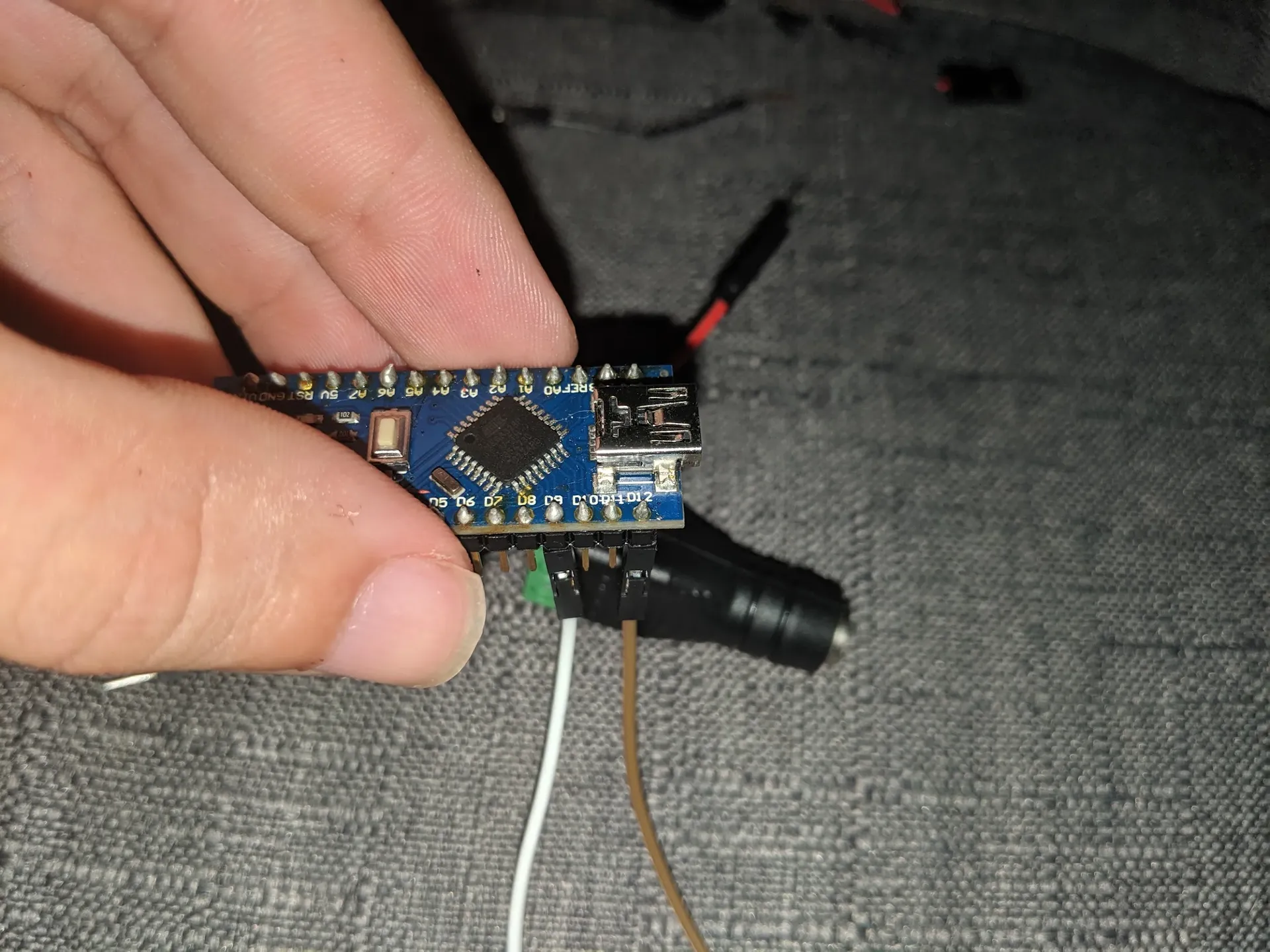
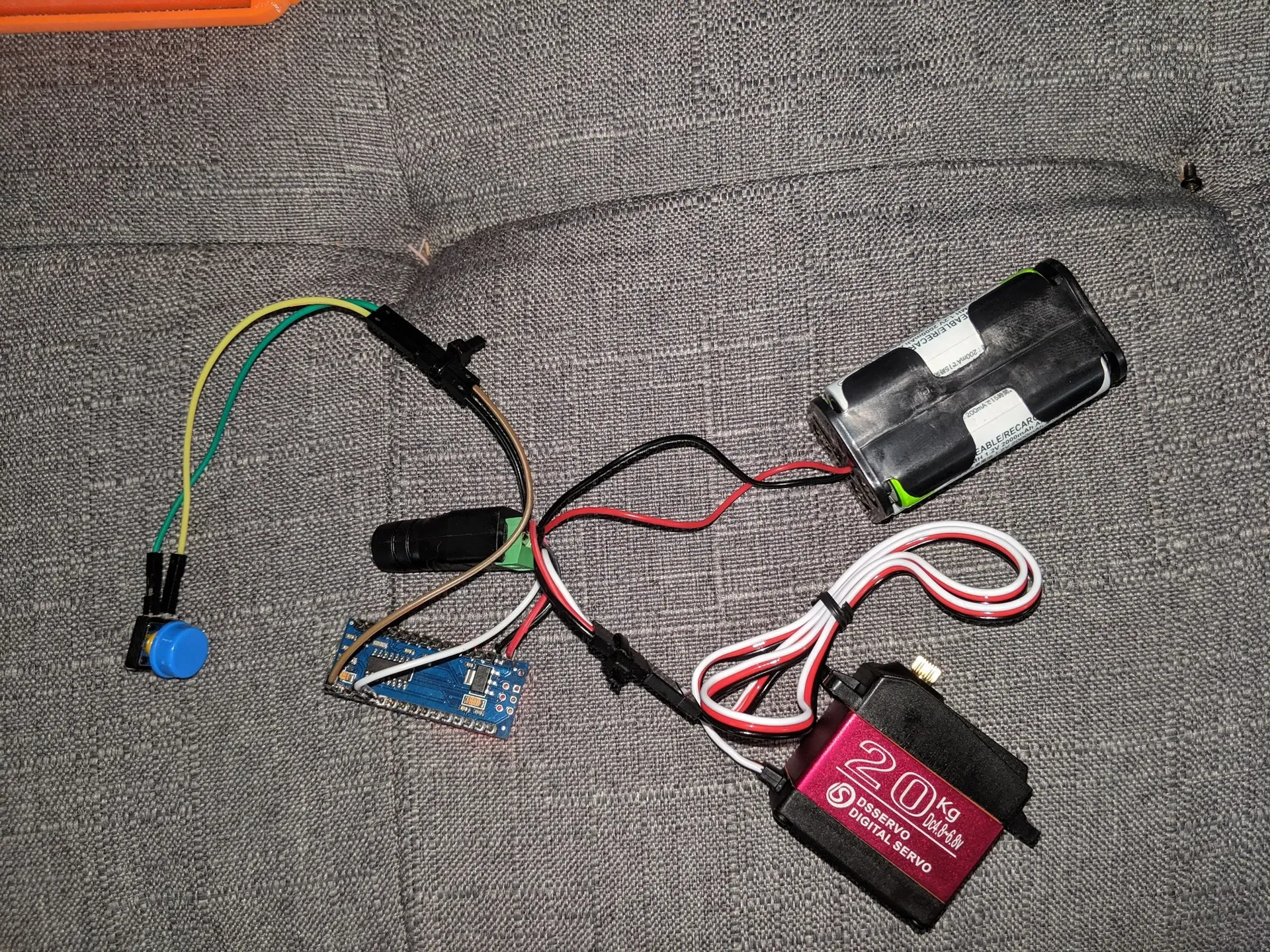
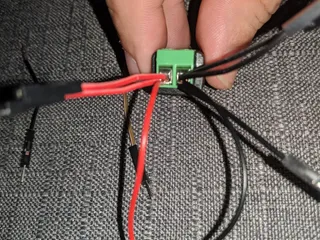
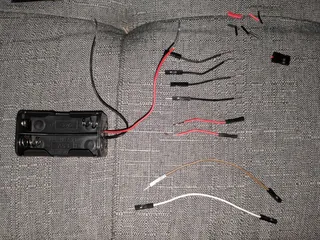
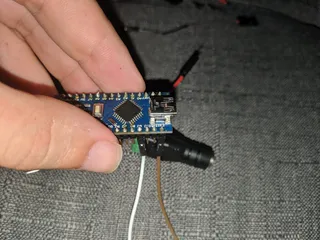
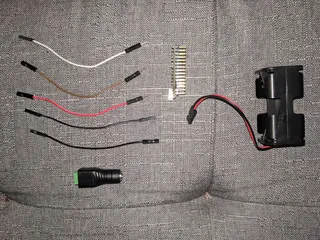
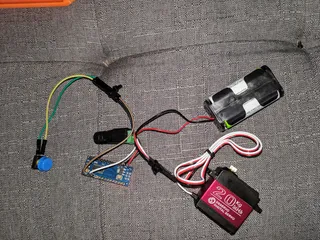
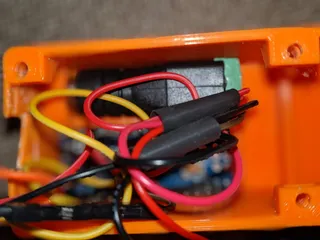
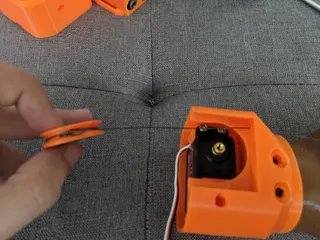
Battery CPU Holder - casing for holding the batteries, arduino nano and DC female plug
Battery CPU Holder Lid - lid for casing. Secured with 4 m3x6 screws
Right Gripper Thumb Inner Channel - slight redesign of the thumb portion of the gripper device to use an internally routed string.
Right Gripper Thumb - simple reposting of the Gripper thumb palm design by Skip Meetze of the Rochester Re-Nable lab.
The live document of assembly instructions/hints/code/etc lives as a google doc at the following link:
https://docs.google.com/document/d/15Qi8354YAS5EJnBqJcT2HUBNaXwBZ5ymHQfw0T9-NeE/edit?usp=sharing
Large redesigns or additions will be published in the thing files as updated PDFs as they occur. The current document for assembly has been tested and worked for three iterations of assembly.
Print instructions
Licence: Creative Commons - Attribution Category: Engineering Print Settings
Printer Brand: Prusa
Printer: i3 MK3 MMU 2
Rafts: No
Supports: Yes
Resolution: 0.2
Infill: 25
Filament: eSUN PLA Brown Post-Printing
Video demonstration of functioning device.
How I Designed This
Design was created entirely in Fusion 360 through lots of iterating and tweaking of casings to minimize size/bulk. Several iterations were attempted to come to a final design that is relatively simple to print, wire and assemble so that any eNABLE volunteer can do so. Cost was another significant consideration, with a total estimated cost of hardware for one device being roughly $42.
Tags
Model origin
The author marked this model as their own original creation. Imported from Thingiverse.







